GPS-Based Proximity Detection System Between Ship and Buoy for Marine Navigation
Keywords:
GPS, Haversine, LoRa, Maritime Navigation, Proximity DetectionAbstract
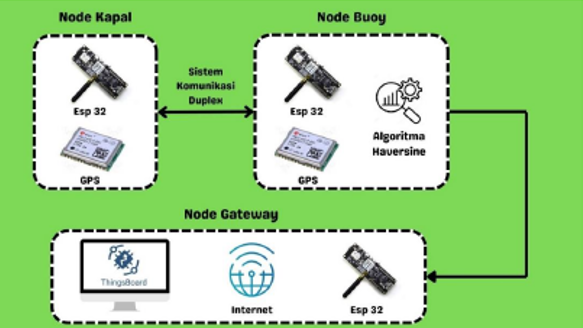
Maritime navigation safety remains a major concern, especially for small vessels that lack advanced navigation aids such as radar or AIS. This study proposes a proximity detection system between a ship and a buoy using GPS data, LoRa communication, and ThingsBoard visualization. The ship node periodically transmits its coordinates through LoRa. In contrast, the buoy node receives the ship position, reads its own GPS coordinates, calculates the separation distance using the Haversine formula, and determines the system status as SAFE or ALERT based on a 50 m threshold. The processed telemetry is then forwarded to a gateway and visualized in real time on ThingsBoard. Experiments were conducted at distances of 10-100 m under two scenarios, with and without an obstacle. In the open-area condition, the system achieved an average percentage error of 3.42%, a mean absolute error (MAE) of 1.82 m, and a root mean square error (RMSE) of 2.47 m. Under obstacle conditions, the average percentage error increased to 24.07%, with MAE and RMSE values of 6.36 m and 6.93 m, respectively. Communication performance remained stable, with a 200-230 ms delay, RSSI values in the good category, and packet loss between 0% and 10%. These results show that the proposed system can provide an affordable early-warning solution for ship-buoy proximity monitoring.
Downloads
Downloads
Published
Versions
- 2026-07-20 (2)
- 2026-04-30 (1)
Issue
Section
License
Copyright (c) 2026 Muhammad Edo Listiawan, Nihayatus Sa'adah, Nailul Muna, Karimatun Nisa', Faridatun Nadziroh

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.