Performance Analysis of Static Vehicle-to-Vehicle Communication Systems Using Software Defined Radio
Keywords:
Vehicle-to-Vehicle Communication, Software Defined Radio, Smart Transportation SystemAbstract
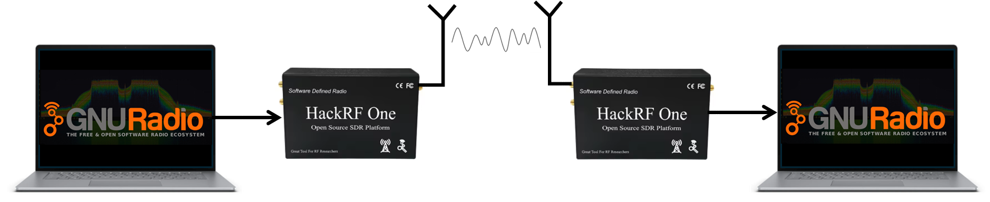
Vehicle-to-Vehicle (V2V) communication is a key component of Smart Transportation Systems (STS), enabling improved road safety, traffic efficiency, and cooperative driving. However, developing flexible, cost-effective, and experimentally validated V2V platforms remains challenging, particularly under varying propagation conditions such as Line-of-Sight (LOS) and Non-Line-of-Sight (NLOS). This paper presents the design and experimental evaluation of a static V2V communication system using a Software-Defined Radio (SDR) platform. The system operates at 2.7 GHz and employs Binary Phase Shift Keying (BPSK) modulation, implemented using the GNU Radio framework. Performance is evaluated under LOS and NLOS conditions at varying distances using Packet Loss (PL), Bit Error Rate (BER), and Signal-to-Noise Ratio (SNR) as key metrics. The main contributions of this work are threefold: (1) the practical implementation of an SDR-based V2V communication system, (2) controlled experimental validation under both LOS and NLOS scenarios, and (3) a comprehensive performance analysis highlighting the impact of distance and environmental conditions. Experimental results show that the system achieves reliable performance under LOS conditions, with zero PL, negligible BER, and SNR up to 13.9 dB at short distances, remaining reliable up to 25 m. In contrast, performance degrades under NLOS conditions due to signal obstruction and multipath effects. These findings demonstrate the feasibility of SDR-based V2V systems and provide insights for improving their robustness in real-world environments.
Downloads
Downloads
Published
Versions
- 2026-07-20 (2)
- 2026-04-30 (1)
Issue
Section
License
Copyright (c) 2026 Muhammad Sirojul Munir, Hendy Briantoro, Mohammad Yanuar Hariyawan

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.